동적 다지기 방법은 매우 높은 에너지파에 의해 지면을 매우 깊게 낮추며 밀도를 높인다. 상기 동적 다지기 방법은 일반적으로 10미터 내지 40미터의 높이에서 떨어지는 일반적으로 10톤 내지 100톤의 무거운 하중체(load)를 포함한다. 지면에서 충돌 점의 배치와 상기 방법의 다른 변수(에너지, 단계, 정지 주기)는 다루어지는 토양의 특성에 의해 좌우되고 가능하게는 시험 구역에서 얻어지는 측정결과에 의해 좌우된다.
이러한 지면 처리 방법은 주로 빌딩의 토대 또는 제방 작업의 안정화된 넓은 영역 또는 치밀하지 못한 토양에사용된다.
동적 지면 다지기 방법의 일반적인 형태는 다음의 2가지로 구분될 수 있다.
1. 종동(follower) 케이블을 구비한 방법
드래그라인(dragline) 작업에 사용되는 케이블 굴삭기(cable shovel)는 주로 일명 "자유낙하"기능을 제공하는클러치 수단을 구비한 권양기(winch)를 갖추고 있다.
이러한 장치는 하나 이상의 권양기 케이블에 다지기 하중체를 장착시킴으로써 동적 지면 다지기에 사용될 수 있다.
소망하는 높이까지 상기 하중체를 들어올리는 권양기가 작동한 후에, 상기 권양 케이블(hoisting cable)과 그 뒤쪽의 상기 권양기 드럼을 구동하는 상기 클러치는풀리고 상기 하중체는 떨어진다.
충돌 후에, 상기 권양기는 회전이 멈추도록 제동되고, 상기 권양 케이블은 다시 당겨지며, 새로운 순환(cycle)이 다시 시작된다.
상기 방법의 단점은, 시장에서 구입 가능한 토목 공사 기계에서, 충돌 시지면에 전해지는 에너지가 하중체를들어올릴 때 축적된 위치 에너지의 단지 50% 내지 60%에 불과하다는 것이다.
이와 같은 낮은 효율은 마찰 손실 및 케이블과 권양기의 관성 때문이다. 이와 같은 방법은 단지 권양기당 단일 케이블(권양기 작동력을 증가시키지 못함)을 사용하고, 권양기 드럼에 단일 케이블 층을 사용함에 의해 적용될 수 있다. 실제로, 상기 방법은 낙하 높이를 약 25m까지 제한하고, 다지기 하중체를 약 25톤까지 제한한다. 따라서, 단위 충돌 에너지(unitary impact energy)는 최대 60% x 25,000 x 9.81 x 25 ≒ 3,700kJ이 된다.
2. 자유 낙하 방법
상기 방법의 낮은 낙하 효율을 해결하기 위하여, 하중이 가해질 때 풀릴 수 있고 상기 다지기 하중체와 상기 권양 케이블 사이에 위치한 연결 장치를 갖춘 권양 장치(hoisting machine)가 사용될 수 있다.
이와 같은 연결 장치는 예선(towage)에 사용되는 것과 같은 후크 형태일 수 있다. 상기 연결 장치는 또한 특별히 설계된 유압 클램프일 수 있다. 상기 다지기 하중체는 권양기가 멈추는 소망하는 높이까지 올려지며, 상기 후크 또는 클램프는 하중체를 풀어서 실제로 자유 낙하시킨다.
상기 방식의 중요한 장점은 충격 에너지가 들어올림 작용에 의해 생산되는 위치 에너지와 같으므로 효율이 높다는 것이다.
또한, 권양기에 의해 가해지는 견인력을 증가시키는 동여맴 시스템(reeving system)을 사용하는 것이 가능하다.
상기 권양기 드럼에 하나 이상의 케이블 층을 또한 사용할 수 있다. 상기 충돌 에너지는 하중체
적재 시 권양 장치의 안정성에 의해 기본적으로 제한된다.
그러나 상기 방법은 또한 많은 단점을 갖고 있다. 연결 수단이 풀릴 때, 상기 하중체를 들어올릴 때 상기 권양장치와 상기 권양 케이블에 축적된 탄성 에너지가 주로 케이블의 반작용에 의해 상기 연결 장치에 갑자기 전달된다.
상기 연결 장치를 구성하며 가능한 경우 상기 동여맴 시스템도 구성하는 이동성 부재들은 상당한 에너지를 가지고 위쪽으로 튀어 오른다. 상기 이동성 부재들은 상기 시스템의 비대칭으로 인해 또한 측 방향으로 밀릴수 있다.
이와 같은 반작용은 상기 권양 케이블의 탈선(derailment)과 같은 다양한 문제를 일으키고 크레인
(crane) 구조 등에 영향을 줄 수 있다. 이와 같은 현상은 전체 효율의 희생 하에 상기 이동 부재의 무게를 방출 하중의 약 20%까지 증가시킴에 의해서 또는 상기 연결 장치의 이동을 제한하는 외부 고정(moor)을 사용함에 의해 보상되어야만 한다.
또한, 지면의 하중체에 재연결하기 위해 상기 연결 장치를 낮추는 것은 주로 낮게 있는 짐이 적재되지 않은 권양기의 속도 용량에 좌우되므로 매우 오랜 시간이 걸린다.
아무리 잘해도, 들어올리는 시간과 같은 정도의 내리는 시간이 예상될 수 있다.
그러므로 이 두 번째 방법은 비교적 시간 소모적이다.
본 발명의 목적은 위에서 언급한 선행기술의 단점을 완화하는 것이다.
본 발명은,적어도 하나의 케이블을 탈착식 연결 수단을 거쳐 지면에 놓인 하중체에 연결하는 단계;
미리 정해진 높이까지 상기 하중체를 들어올리도록 상기 권양 케이블에 견인력을 가하는 단계;
상기 권양 케이블이 따르는 상기 하중체의 하향 이동을 시작하도록 상기 견인력을 감소시키는 단계;
및 상기 하중체가 하향 이동하는 동안 상기 연결 수단을 푸는 단계를 포함하는 지면 다지기 방법을 제안한다.
하나 이상의 "자유 낙하" 형태(종동 케이블을 구비한 앞의 방법과 같은)의 권양기는 상기 권양기의 작용력을 증가시키는 도르래(pulley) 블록의 가능한 사용으로 들어올림을 수행한다. 다지기 하중체는 탈착식 연결 수단, 예를 들어 후크나 클램프 형태의 연결 수단을 거쳐 하부 블록에 매달리거나 권양기 케이블에 직접 매달린다.
상기연결 수단은 일정한 하향 속도에 도달하면 풀려서 상기 권양 케이블에 연결된 연결 부재가 상향 이동하지 않도록 한다.
이것은 외부 고정 시스템(mooring system)의 필요없이도 상기 구조에 피해가 없도록 한다.
게다가, 상기 연결 수단과 상기 권양 케이블의 하향 속도는 하중체가 풀렸을 때 하중체가 지면에 도달한 후에 상기 연결수단을 상기 하중체의 위치에 다시 가져다놓는데 필요한 시간을 줄인다.
본 발명에 따른 또 다른 형태는 크레인 암(crane boom), 권양기 수단, 상기 크레인 암의 상부의 편향 도르래(deviation pulley) 주변의 권양기 수단으로부터 연장되는 적어도 하나의 케이블, 상기 권양 케이블을 하중체에연결하도록 하는 탈착식 연결 수단, 및 상기 권양 케이블을 따르는 상기 하중체가 하향 이동을 시작하도록 하는 상기 권양기 수단에 의해 가해지는 견인력을 줄이고 상기 하중체가 하향 이동하는 중에 상기 연결 수단을 풀고 미리 결정된 높이까지 지면으로부터 상기 하중체를 들어올리는 권양기 수단을 작동하는 제어 수단을 포함하는 지면 다지기 장치에 관한 것이다.
특허 기술 설명
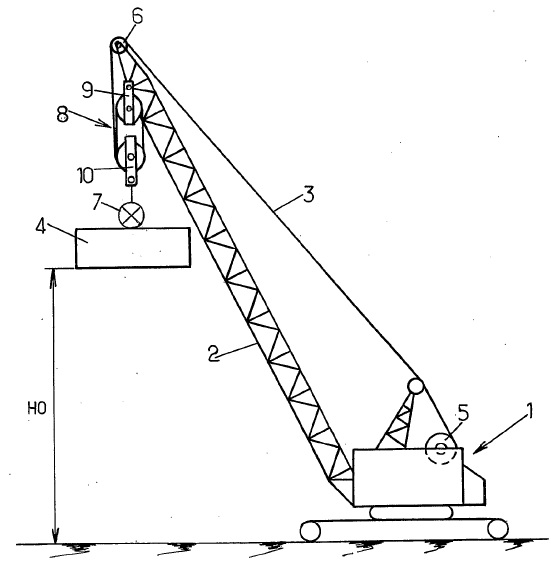
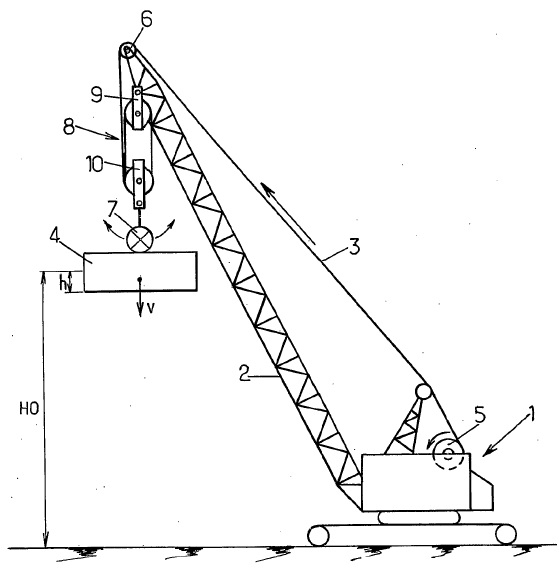
지면 다지기 장치는 크레인 암(2)을 지지하는 차량 구조(1)
도1 또는 도4
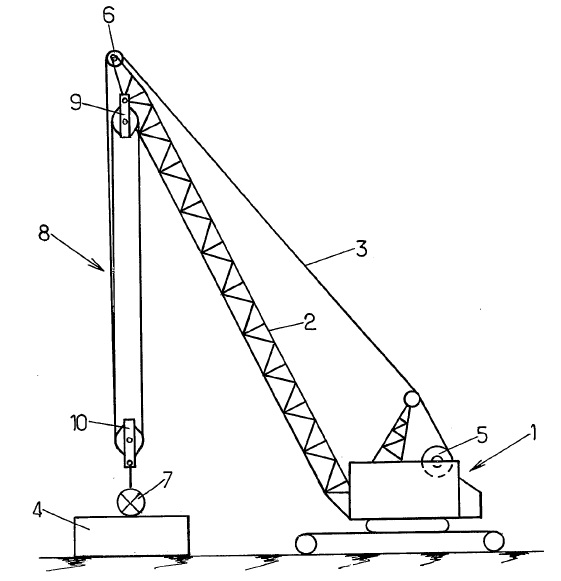
하나 이상의권양 케이블(3)은 지면 높이에서 미리 결정된 낙하 높이(>10m)까지 무거운 하중체(4)(>10톤)를 들어올리는 데사용된다.
권양 케이블(3) 각각은 상기 구조(1)에 장착된 권양기(5)의 드럼에 감겨있고, 상기 크레인 암(2) 상
부의 도르래(6)에 의해 편향된다.
개략적으로 도시된 탈착식 연결 장치(7)는 상기 권양 케이블(3)과 상기 다지기 하중체(4) 사이
에 개재된다.
상기 장치는 상기 편향 도르래(6)와 상기 탈착식 연결 장치(7) 사이의 상기 권양 케이블(3)을 수용하는 동여맴 시스템(reeving system)을 또한 포함한다. 상기 동여맴 시스템(8)은 상기 크레인 암(2)의 상부에 인접하여 장착된 상부 도르래 블록(9)과 그 프레임이 상기 탈착식 연결 장치
(7)에 연결된 하부 도르래 블록(10)을 포함할 수 있다.
상기 권양 케이블(3)은 상기 권양기(5)에 의해 가해지는 권양력을 증가시키도록 상기 블록(9, 10)의 도르래에 의해 수용된다.
본 발명의 다른 실시예에 있어서, 상기 권양 케이블(3)이 상기 탈착식 연결 장치(7)에 직접 연결될 수 있다는 것을 이해할 수 있다.
상기 탈착식 연결 장치의 예시적인 실시
도5)
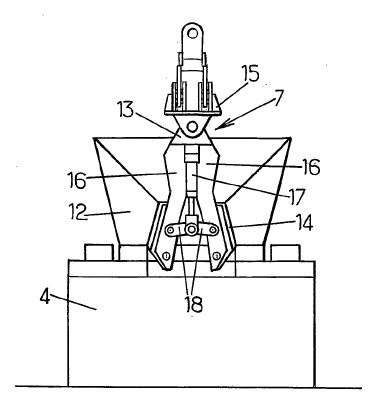
이 실시예에 있어서, 다지기 하중체의 상부면은 유압 클램프(13)를 수용하도록 구성된 소켓(12)에 맞추어진다. 상기 소켓(12)은 상기 클램프(13)가 상기 소켓에 바르게 위치하도록 낮추어지는 것과 같이 상기 클램프(13)의 중심을 맞추도록 상부 면을 향해 바깥쪽으로 테이퍼진 상부 원뿔형 부분을 구비한 넓은 중심 구멍(aperture)을 구비한다.
상기 소켓(12)의 하부에있어서, 그 중심 구멍은 상기 클램프(13)를 수용하기에 알맞은 리세스(recess)(14)를 형성하도록 넓혀진다.
상기 클램프(13)는 동여맴 시스템(8)의 하향 도르래 블록(10)에(또는 상기 권양 케이블(3)에 직접) 연결되도록 브래킷(15)을 구비한다.
다수의 조 부재(jaw member)(16)는 상기 브래킷(15)의 하부에 관절로 연결된다.
이러한조 부재(16)는 수직 축에 대칭으로 배치된다. 상기 브래킷의 하부에서, 상기 조 부재의 외부 형상은 상기 소켓(12)에 제공되는 리세스(14)의 형상에 맞도록 원뿔 형상이다. 대향 조 부재(16)의 쌍 각각은 지레 장치(levermechanism)를 거쳐 유압 잭(hydraulic jack)에 의해 작동된다. 상기 지레 장치는 수평 축에 대해 상기 조 부재(16) 중 하나에 외측 단부가 관절로 연결되는 한 쌍의 봉(18) 각각을 포함한다.
상기 2개의 봉(18)은 상기 장치(7)의 수직 대칭축을 횡단하는 수평 축에 대하여 또한 함께 관절로 연결된다. 상기 유압 잭(17)은 수직으로 배치된다.
상기 유압 잭의 확장은 상기 2개의 봉(18) 사이의 연결 점을 낮추어서, 상기 조 부재(16)를 서로로부터상기 조 부재가 상기 리세스(14)에서 상기 소켓(12)에 대해 눌려지는 조임 위치로 이동시킨다.
상기 유압 잭(17)의 수축력으로 인해 상기 2개의 봉(18) 사이의 연결 점을 들어올려지고, 상기 조 부재(16)들이 서로에 대해더 가까이 이동되어 상기 클램프(13)와 상기 소켓(12) 사이가 분리되게 함으로써 상기 연결이 해제된다.
상기 탈착식 클램프(13)의 유압 잭(17)은 상기 권양기(5)와 함께 작동하면서 아래에 설명한 작동 순서(sequence)를 제공하기 위해 제어 유닛(도시되지 않음)에 의해 구동된다.
일단 지면에 대한 충돌 패턴과 충돌 순서가 결정되면, 상기 장치와 상기 하중체(4)는 제1 위치로 온다.
상기 클램프(13)는 도 1에 나타난 것과 같이 지면에 놓인 하중체(4)를 잡도록 낮추어지고 제어된다.
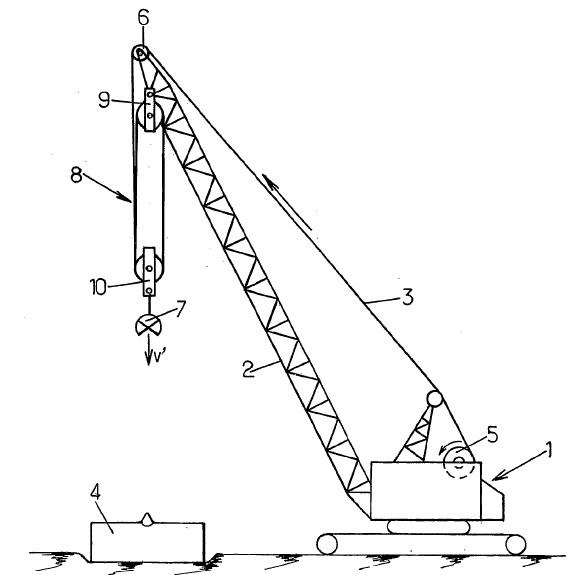
그 다음에 상기 권양기(5)에는 도 2에 나타난 것과 같이 상기 하중체(4)를 미리 결정된 높이 H0까지 들어올리도록 에너지가 주입된다.
이 순간에, 중요한 위치 에너지 M x g x H0가 형성되며, 여기서 M은 상기 하중체(4)의 높이를 나타낸다. 이상적으로는, 상기 하중체를 낙하시킬 때 이 위치에너지의 100%가 지면에 전달된다.
치에서 상당한 탄성 에너지가 상기 권양 케이블(3)과 상기 장치의 구조
도2)
상기 하중체의 위 그림에 나타난 위치로부터의 하향 이동은 2가지 단계로 수행된다.
제1 단계에서, 상기 권양기(5)는 드럼이 풀리도록 제어되지만, 클램프(13)는 아직 풀리지 않은 채로 있게 된다.
이것은 상기 권양기(5)에 의해 발생하는 견인력을 없애거나 강하게 감소시킨다.
제1 단계는 아래 그림에 나타난 것과 같이 상기 하중체(4)가 일정한 하향 속도(v)에 도달할 때까지 수행된다.
도3)
이때에, 상기 클램프(13)를 푸는 것에의해 제2 단계가 시작되어서 상기 하중체(4)가 지면으로 자유낙하 되도록 한다.
상기 하중체(4)와 상기 클램프(13)는 상기 클램프가 풀렸을 때는 이미 일정한 속도(v)를 갖고 있으므로, 상기클램프(13)와 상기 동여맴 시스템(8)의 하부 부재(10)는 상기 권양 케이블(3)과 상기 크레인 암(2)에 축적된 탄성 에너지의 갑작스런 방출에 의해 위쪽으로 튀어 오르지 않는다. 이로 인해 선행 기술의 자유낙하 방식의 단점을 피할 수 있다.
제2 단계에서, 상기 권양기 드럼(5)의 회전은 상기 연결 장치(7)가 상기 하중체(4)를 향해 낮아지는 것과 같이상기 연결 장치의 하향 속도(v')를 제어하기 위해 적당한 클러치 수단(도시되지 않음)에 의해 제동된다.
상기 클램프(13)가 일단 연결되면, 다른 순환 과정이 지면의 동일한 위치에서 또는 상기 장치와 상기 하중체를측방향으로 이동시킨 후에 수행될 수 있다.
간단한 실시예에 있어서, 상기 연결 장치(7)는 상기 권양기 드럼(5)이 풀린 후 미리 결정된 시간 t에 풀린다(예를 들어 도 5에 나타난 유압 잭(17)을 수축시킴에 의해).
선택적으로, 상기 연결 장치는 위치 센서와 맞추어 질 수 있다.
그 다음에 상기 장치(7)는 일정한 거리 h만큼하향 이동하면(또는 상기 장치가 H0-h의 높이에 도달했을 때와 동일) 풀린다.
다른 선택적인 실시예에 있어서, 상기 연결 장치(7)는 제1 단계에서 상기 하중체의 낙하 속도를 감시하는 속도센서와 맞추어진다.
그래서 상기 푸는 조건은 감지된 낙하 속도가 미리 결정된 문턱 값(v)에 도달하는 것이며, 상기 유압 잭(17)은 제어 유닛에 의해 그 조건의 감지에 응답하여 수축된다.
위에서 언급한 문턱 값의 전형적인 크기의 차수는 t≒0.5초, h≒1m, 및 v≒4m/s이다. 권양 높이 H0가 일반적으로 10미터(예를 들어 H0=25m)이므로, 다지기 하중체(4)는 일정한 하향 속도(v)를 또한 얻는 순환 과정의 제1 단계에서 그 위치에너지의 약간의 비율 이상을 잃지 않는다.
그러므로 충돌 시 지면에 전달되는 전체 에너지는 초기 위치에너지에 매우 근접하게 된다. 이것은 상기 방식의 효율이 매우 중요하다는 것을 의미하고, 상기 권양기와 상기 구조의 관성은 단지 짧은 제1 단계를 거친다.
이와 같은 높은 효율은 상기 하중체(4)가 비교적 짧은 순환 시간(cycle time)으로 떨어질 때 상기 클램프(13),상기 권양 케이블, 및 상기 도르래 블록(10)을 차 올림(kicking up)에 의해 상기 구조를 위험하게 하지 않으면 서도 달성된다.
발명자: 모리조 쟝 끌로드
대리인: 박장원
|
권 리 란 |
|
표시번호 |
사 항 |
|
1번 |
|
출원 연월일 : |
2006년 07월 11일 |
출 원 번 호 : |
10-2006-7013972 |
|
공고 연월일 : |
2011년 10월 11일 |
공 고 번 호 : |
|
|
특허결정(심결)연월일 : |
2011년 08월 31일 |
청구범위의 항수 : |
12 |
|
유 별 : |
E02D 3/02 |
|
발명의 명칭 : |
동적 지면 다지기 방법 및 장치 |
|
존속기간(예정)만료일 : |
2024년 01월 12일 |
|
2011년 10월 04일 등록 | |
|
특 허 권 자 란 |
|
순위번호 |
사 항 |
|
1번 |
|
(등록권리자) |
|
프레이씨네 |
|
|
|
|
|
2011년 10월 04일 등록 | |
'동적 지면 다지기 방법 및 장치' 특허 자세히 보기
 동향
동향
 건축 / 구조물
건축 / 구조물 
