본 발명에 따르면, 로봇에 인가되는 외력을 시계열적인 센싱신호로 획득하고, 센싱신호를 분석하여 외력이 부정적 입력인지 여부에 따라 감성표현을 할 수 있도록 로봇을 제어하는 로봇의 감성표현방법이 제공된다.
일반적으로, 애완용 로봇에 사용되는 사용자와의 상호교감 인터페이스는 터치, 음성, 영상, 리모콘, 스위치가 대표적이다.
여기서, 터치와 스위치는 사용자와 직접접촉을 위한 대표적인 인터페이스로서, 이 같은 인터페이스를 통해 애완용 로봇은 사용자와 직접적 접촉을 통하여 교감하고 감성을 사용자에게 표현함으로써, 애완용 로봇은 마치 실제 애완동물과 같이 사용자와 상호교감하는 듯한 느낌을 줄 수 있다.
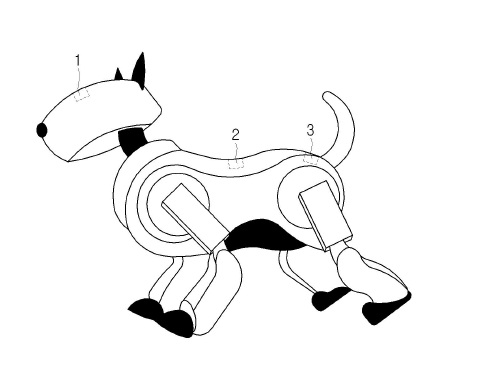
이 같은 감성표현을 구현하기 위해, 종래 애완용 로봇에는 도 1에서와 같은 애완용 로봇의 다양한 부위에 접촉센서(1,2,3)를 설치하되, 각 부위를 긍정 또는 부정으로 구분하여 설치하였다.
도1)
즉, 애완용 로봇은 도 2에서와 같이
도2)
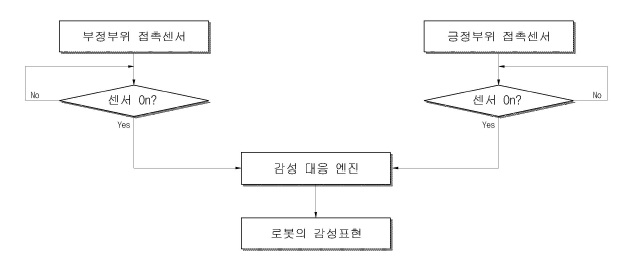
긍정부위의 터치센서의 입력이 감지되면 감지된 입력을 토대로 감성대응엔진을 통해 긍정적 감성표현을 구현하도록 제어되고, 부정부위의 터치센서의 입력이 감지되면 감지된 입력을 토대로 감성대응엔진을 통해 부정적 감성표현을 구현하도록 제어되었다.
또한, 종래 애완용 로봇의 감성표현을 구현하기 위한 다른 방법으로는, 다양한 부위별로 터치센서를 설치한 뒤, 도 3에서와 같이 터치센서에 접촉되는 시간에 따라 긍정 또는 부정적 감성표현을 하도록 제어되었다.
도3)
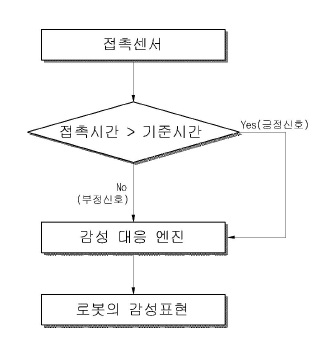
즉, 애완용 로봇은 각 터치센서에 접촉이 유지되는 시간이 사전에 로봇에 설정된 기준시간보다 짧을 경우 부정적 신호로 감지하게 되고, 이를 토대로 하여 감성대응엔진을 통해 부정적 감성표현을 구현하도록 제어되고, 각 터치센서에 접촉이 유지되는 시간이 기준시간보다 긴 경우 긍정적 신호로 감지하게 되고, 이를 토대로 하여 감성대응엔진을 통해 긍정적 감성표현을 구현하도록 제어되었다.
그러나, 생태모방학에 근거하여 살아있는 생물체인 애완용 동물을 연상해보면, 애완용 동물은 직접접촉 시의 힘의 크기, 힘의 방향 및 힘의 지속시간에 의해서 쓰다듬거나 때리는 것이 구분된다.
즉, 종래 터치센서를 이용하여 부위별로 긍정 또는 부정신호를 전송받아 전송받은 신호에 따라 애완용 로봇의 감성을 표현하는 것이나, 터치센서의 접촉시간에 따라 애완용 로봇의 긍정 또는 부정적 감성을 표현하는 것은 생태모방학에 비춰봤을 때, 사용자에게 상호교감을 하는 것과 같은 느낌을 주는 것이 아니라 일정한 부위에 일정한 시간에 따라 반응을 하는 것과 같은 느낌만 주게 되고, 이에 따라 애완용 로봇과 사용자와의 교감은 다소 억지스럽고 부자연스러운 한계가 있었다.
따라서, 본 발명의 목적은 이와 같은 종래의 문제점을 해결하기 위한 것으로서, 로봇에 인가되는 외력을 시계열적인 센싱신호로 획득하고, 센싱신호를 분석하여 외력이 부정적 입력인지 여부에 따라 감성표현을 할 수 있도록 로봇을 제어하는 로봇의 감성표현방법을 제공함에 있다.
특허 기술 설명
상기 목적은, 본 발명에 따라, 내장된 감성대응엔진을 통해 로봇의 감성을 표현하는 로봇의 감성표현방법에 있어서, 상기 로봇에 외력 인가시, 상기 로봇에 내장된 센서를 통해 상기 외력을 시계열적인 센싱신호로 획득하는 센싱단계; 상기 센싱신호를 분석하여 상기 힘이 부정적 입력인지를 판단하는 판단단계; 상기 힘이 부정적 입력으로 판단되면, 상기 센싱신호를 상기 감성대응엔진으로 전송하는 전송단계; 상기 감성대응엔진이 상기 센싱신호를 토대로 상기 로봇이 기저장된 행동패턴에 따라 행동하도록 제어하는 감성표현단계;를 포함하는 것을 특징으로 하는 로봇의 감성표현방법에 의해 달성된다.
이때, 상기 판단단계는, 상기 센싱신호와 사전에 로봇에 저장된 임계값을 비교하는 비교단계와, 상기 센싱신호가 상기 임계값을 초과하면 상기 외력을 부정적 입력으로 결정하는 결정단계를 포함할 수 있다.
한편, 상기 판단단계는, 위상지연 가중치를 설정변수로 하는 필터링 수식을 포함한 필터를 마련하고, 상기 위상지연 가중치를 서로 다르게 설정하여 상기 센싱신호를 상기 필터를 통해 제1출력신호와 제2출력신호로 출력하는 출력단계와, 상기 출력단계에서 출력된 상기 제1출력신호와 상기 제2출력신호 중 상기 위상지연 가중치가 큰 값으로 설정된 필터링 수식을 포함한 필터로부터 출력된 출력신호를 사전에 설정된 오프셋(offset)값만큼 오프셋하는 오프셋단계와, 상기 위상지연 가중치가 작은 값으로 설정된 필터링 수식을 포함한 필터로부터 출력된 출력 신호가 상기 오프셋 단계에서 오프셋된 출력신호를 초과하는지를 분석하는 분석단계와, 상기 분석단계에서 상기 위상지연 가중치가 작은 값으로 설정된 필터링 수식을 포함한 필터로부터 출력된 출력신호가 상기 오프셋 출력 신호를 초과하면 상기 외력을 부정적 입력으로 결정하는 결정단계를 포함할 수 있다.
또한, 상기 출력단계에서 상기 위상지연 가중치는 0 이상이고 1 이하인 값 중 서로 다른 두 값이 선택되어 설정 될 수 있다.
아울러, 상기 센싱단계에서 상기 센싱신호는 상기 로봇에 내장되는 가속도센서, FSR(Force Sensitive Resistor) 및 스트레인게이지(strain gauge)로부터 시계열적으로 획득되는 가속도신호, 압력변화신호 또는 변형량신호 중 어느 하나일 수 있다.
설명에 앞서, 여러 실시예에 있어서, 동일한 구성을 가지는 구성요소에 대해서는 동일한 부호를 사용하여 대표적으로 제1실시예에서 설명하고, 그 외의 실시예에서는 제1실시예와 다른 구성에 대해서 설명하기로 한다.
먼저, 본 발명에 따른 애완용 로봇에는 가속도센서, FSR(Force Sensitive Resistor) 및 스트레인 게이지(Strain Gauge) 등의 각종 센서가 설치되어 있다.
여기서, 각 센서들은 일정한 로봇의 보행 등과 같은 각종 제어동작시에 각각 로봇에 발생하는 연속적인 변화를 실시간으로 시계열적인 센싱신호로 획득하도록 설치된다.
만약, 애완용 로봇에 일정한 힘(이하 "외력"이라고 함, 예:사용자의 "때림","누름" 등)이 인가되면, 인가되는 외력의 시계열적인 변화는 로봇에 내장된 상기 센서로부터 획득되는 시계열적인 센싱신호로 알 수 있다.
다시 말해, 가속도센서는 외력 인가시, 외력에 의한 로봇의 가속도 변화를 센싱하여 시계열적인 센싱신호로 획득하게 되는데, 획득된 센싱신호를 통해서 로봇 외부에서 로봇에 인가된 힘의 시계열적인 변화를 알 수 있다.
또한, FSR(Force Sensitive Resistor)은 외력에 의한 압력변화를 센싱하여 시계열적인 센싱신호로 획득하게 되는데, 획득된 센싱신호로부터 FSR이 설치된 면적에 인가된 외력의 시계열적인 변화를 알 수 있다.
아울러, 스트레인 게이지는 외력에 의한 변형량을 이용해서 시계열적인 센싱신호를 획득하게 되는데, 획득된 센싱신호로부터 스트레인 게이지에 인가된 외력의 시계열적인 변화를 알 수 있다.
결과적으로, 센서로부터 획득된 시계열적인 센싱신호를 통해 외력의 시계열적인 변화를 알 수 있으므로, 획득된 시계열적인 센싱신호가 곧 외력의 시계열적인 변화를 나타낸다고 할 수 있다.
한편, 가속도센서는 3축(x축, y축, z축)으로부터 인지된 각 신호를 포함하므로 이를 토대로 중앙제어부에서는 외력으로부터 인가되는 힘의 방향성분도 인식해낼 수 있다. FSR이나 스트레인 게이지는 부착면에 인가되는 힘을 측정하기 때문에 센서의 부착 위치/각도에 의해서 외력으로부터 인가되는 힘의 방향성분을 알 수 있다.
애완용 로봇의 중앙제어부에는 인가된 힘이 부정적 입력인지 아닌지를 판단할 수 있는 기준값인 임계값이 기설 정되어 저장될 수 있다.
아울러, 중앙제어부에는 위상지연 가중치를 설정변수로 하는 필터링 수식을 포함한 필터가 마련되어 상술한 바 와 같은 시계열신호를 상기 필터를 통해 출력신호로 출력하도록 구성될 수도 있다.
이 같은 임계값 설정과 필터의 구성은 중앙제어부에 적어도 어느 하나를 구성하는 것이 바람직하다.
여기서, 위상지연 가중치란 설정변수로서, 0 이상이고 1 이하인 값 중 서로 다른 두 값이 선택되어 설정될 수있고, 0에 근접할수록 필터를 통과한 출력신호의 누적신호를 적게 참조하고, 1에 근접할수록 필터를 통과한 출력신호의 누적신호를 많이 참조하는 것을 의미한다.
즉, 필터를 통한 출력신호는, 위상지연 가중치가 0에 근접할수록 필터를 통과하기 전의 시계열적인 센싱신호에 근사적으로 가까운 형태가 나타나며, 1에 근접할수록 시계열적인 센싱신호보다 진폭이 작아지는 형태로 나타나게 된다.
본 발명에서의 필터는 이해를 도모하고자 가장 단순한 형태인 1차 저역통과필터 즉, 1차 필터링 수식이 내장된 필터를 후술할 실시예에서 나타내었으며, 필터의 성능향상 및 검출해야하는 부정적 입력의 검출도의 향상을 위해서 2차 또는 3차 등의 고차 저역통과필터 등의 다양한 필터를 마련할 수도 있다.
또한, 본 발명에 따른 애완용 로봇에는 감성대응엔진이 마련되어 상술한 바와 같은 센싱신호를 분석한 결과가 부정적 입력으로 판단되면, 감성대응엔진은 센싱신호를 토대로 기저장된 행동패턴에 따라 행동하도록 마련된다.
여기서, 감성대응엔진은 센싱신호의 방향성분을 토대로 일정한 방향성을 가진 행동을 구현하도록 마련될 수도 있다.
아울러, 본 발명에서의 부정적 입력이란, 일반적으로 애완용 로봇에 인가되는 힘 중 사용자의 감정상태가 부정적 상태에서 가해지는 "때림" 또는 "강한 누름" 등을 포함하는 사용자의 물리적 타격으로 정의한다.
이하, 첨부한 도면을 참조하여 본 발명의 제1실시예에 따른 로봇의 감성표현방법에 대하여 상세하게 설명한다.
도 4는 본 발명의 제1실시예에 따른 로봇의 감성표현방법의 알고리즘이다. 도 4를 참조하면,
도4)
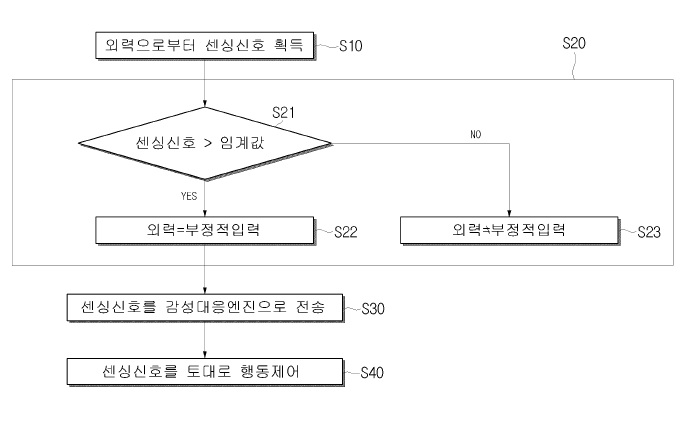
본 발명의 제1실시예에 따른 로봇의 감성표현방법은 센싱단계(S10), 판단단계(S20), 전송단계(S30), 감성표현단계(S40)을 포함하여 구성된다.
최초, 애완용 로봇에 사용자 등에 의해 힘이 가해지면, 애완용 로봇에 설치된 각종 센서는 인가되는 외력을 실시간으로 센싱하여 시계열적인 센싱신호로 획득한다(S10).
이때, 획득되는 센싱신호는 상술한 바와 같이 가속도, 압력 또는 변형량 중 적어도 어느 하나의 시계열적인 변화를 나타낸다.
이후, 센싱신호를 분석하여 외력이 부정적 입력인지 아닌지를 판단하되(S20), 비교단계(S21)와 결정단계(S22)를 통해 판단한다.
즉, 센싱신호와 임계값을 비교하고(S21), 센싱신호가 임계값을 초과하면 외력을 부정적 입력으로 결정한다(S22).
여기서, 임계값은 상술한 바와 같이 사전에 로봇에 저장되어 있는 값이다.
만약, 센싱신호가 사전에 로봇에 저장된 임계값을 초과하지 않으면 부정적 입력이 아니라고 결정한다(S23)
이후, 판단단계(S20)를 통해 외력이 부정적 입력으로 판단되는 경우에만 중앙제어부는 센싱신호를 감성대응엔진으로 전송한다(S30).
이어, 감성대응엔진은 전송된 센싱신호를 토대로 일정한 행동을 하도록 제어한다(S40).
이때, 감성대응엔진은 센싱신호의 외력의 방향성분을 토대로 일정한 방향성을 갖는 행동을 하도록 제어할 수도있다.
상술한 바와 같은 본 발명의 제1실시예에 따른 로봇의 감성표현방법을 구체적인 일례를 들어 설명한다. 먼저,상술한 바와 같이 로봇에는 인가되는 힘이 부정적 입력인지를 판단하는 기준값인 임계값(Gth)이 저장되어 있음을 가정한다.
도 5는 로봇에 인가되는 외력에 따라 획득된 시계열적인 센싱신호이다.
도5)
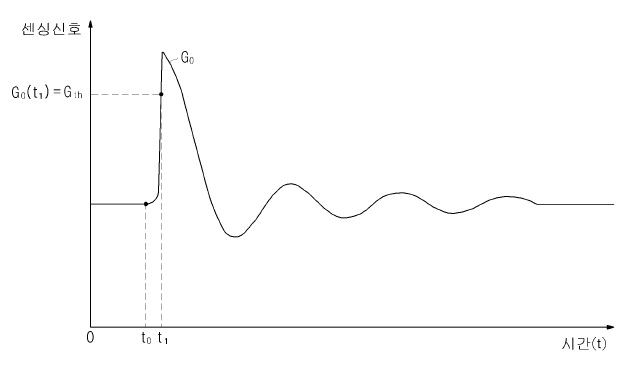
도 5를 참조하면, 센싱신호(G0)는 t0에서 외력이 인가되면 t0이후부터 급격히 상승한다.
이후, t1에서의 센싱신호(G0)는 임계값(Gth)과 일치하고, t1이후에 센싱신호(G0)는 임계값(Gth)을 초과하므로 인가된 외력을 부정적 입력으로 판단한다.
여기서, 센싱신호(G0)는 일반적으로 다수의 노이즈를 포함하므로, 보다 정확하게 임계값(Gth)과의 비교를 위해,중앙제어부에 소정의 저역통과필터를 마련하고 이를 통해 노이즈를 억제한 후에 임계값(Gth)과 비교할 수도 있다.
이후, 인가된 외력이 부정적 입력으로 판단되면 감성대응엔진으로 센서로부터 획득된 센싱신호를 전송한다.
이어, 감성대응엔진은 전송된 센싱신호를 토대로 하여 로봇이 짖는 행동과 같은 일정한 행동을 하도록 구현할 수 있다.
아울러, 센싱신호의 방향성분을 토대로 로봇이 때리는 방향의 반대방향 또는 다른 방향으로 도망을 가는 등의 행동을 구현할 수도 있고, 인가된 외력의 방향으로 덤벼드는 행동을 하도록 제어할 수도 있다.
이와 같이 인가되는 외력의 변화가 실시간으로 내장된 센서를 통해 시계열적인 센싱신호로 획득되고, 획득되는 센싱신호를 분석하여 이를 토대로 로봇이 행동을 하도록 구현함으로써, 종래 센서로부터 입력되는 센서의 접촉 시간에 따라 로봇의 행동을 구현하는 것과 달리 로봇과 더욱 상호 교감을 하는 듯한 느낌을 사용자가 느낄 수 있다.
다음, 본 발명의 제2실시예에 따른 로봇의 감성표현방법에 대해 설명한다. 도 6은 본 발명의 제2실시예에 따른 로봇의 감성표현방법의 알고리즘이다.
도 6을 참조하면,
도6)
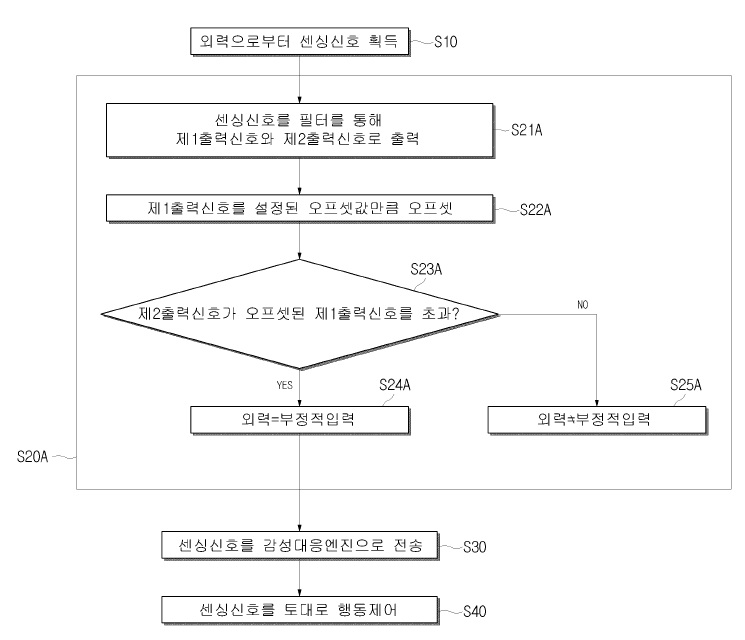
본 발명의 제2실시예에 따른 로봇의 감성표현방법은 센싱단계(S10), 판단단계(S20A), 전송단계(S30), 감성표현단계(S40)을 포함하여 구성된다.
여기서, 전송단계(S30), 감성표현단계(S40)는 제1실시예와 동일하므로 상세한 설명은 생략한다.
또한, 중앙제어부에는 상술한 바와 같이 위상지연 가중치를 설정변수로 갖는 소정의 필터링 수식을 포함한 필터가 마련된다.
제2실시예에서도 제1실시예에서와 같이, 최초 애완용 로봇에 사용자 등에 의해 외력이 가해지면, 애완용 로봇에 설치된 각종 센서는 인가되는 외력의 변화를 실시간으로 시계열적인 센싱신호로 획득한다(S10).
이때, 획득된 센싱신호를 필터링 수식을 포함한 필터를 통해 출력된 두 출력신호를 토대로 인가된 외력이 부정적 입력인지의 여부를 출력단계(S21A), 오프셋단계(S22A), 분석단계(S23A) 및 결정단계(S24A)를 통해 판단한다(S20A).
이 같은 필터에 센싱신호를 입력신호로 설정하여 출력신호로 출력하되, 상기 필터의 위상지연 가중치를 서로 다르게 설정하여 제1출력신호와 제2출력신호를 출력한다(S21A).
여기서, 위상지연 가중치란 상술한 바와 같이, 0 이상이고 1 이하인 값 중 다른 두 값이 선택되어 설정되며, 1에 근접할수록 필터를 통과한 출력신호의 누적신호를 많이 참조하고, 0에 근접할수록 필터를 통과한 출력신호의 누적신호를 적게 참조하도록 설정되는 변수이다.
또한, 후술되는 두 출력신호는 설명의 편의상 서로 다른 값으로 선택된 위상지연 가중치 중 큰 값의 위상지연 가중치가 적용된 출력신호를 제1출력신호로 정의하고, 작은 값의 위상지연 가중치가 적용된 출력신호를 제2출력 신호로 정의한다.
이 같은 필터를 통해 출력된 제1출력신호와 제2출력신호 중 위상지연 가중치가 큰 값으로 설정된 필터로부터 출력된 제1출력신호를 사전에 설정된 오프셋(offset)값만큼 오프셋한다(S22A).
여기서, 오프셋값은 사전에 반복실험을 통해 일정한 범위 내에서 설정될 수 있는 값으로서, 0 이상이고 실험시인가되는 외력으로부터 도출된 센싱신호의 최대값의 사이값 중 어느 하나로 설정될 수 있다.
이후, 제2출력신호가 오프셋된 제1출력신호를 초과하는지를 분석하고(S23A), 상기 제2출력신호가 오프셋된 제1출력신호를 초과하면 감지된 힘을 부정적 입력으로 결정하고(S24A), 초과하지 않으면 감지된 힘을 부정적 입력 이 아니라고 결정한다(S25A).
이어, 감지된 힘이 부정적 입력으로 판단된 경우에만 제1실시예에서와 같이 감성대응엔진으로 센싱신호를 전송하고(S30), 감성대응엔진에서는 전송된 센싱신호를 토대로 로봇이 일정한 행동을 하도록 제어한다(S40).
상술한 바와 같은 본 발명의 제2실시예에 따른 로봇의 감성표현방법을 구체적인 일례를 들어 설명한다
일례에서는, 사전에 로봇의 중앙제어부에 아래 수학식 1과 같은 필터링 수식을 포함한 필터가 마련된다.
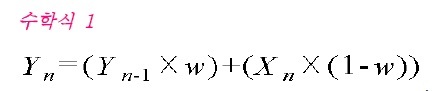
Xn은 입력신호, Yn은 출력신호, w는 위상지연 가중치(weighting factor)이다.
여기서, 입력신호(Xn)는 센서로부터 획득된 센싱신호이고, 상기 수학식 1은 필터링 수식이며, 상기 수학식 1을통해 두 출력신호가 출력되도록 위상지연 가중치(w)는 0 이상이고 1 이하인 서로 다른 두 값으로 선택되어 설정된다.
도 7은 도 5의 센싱신호를 필터를 통해 출력한 출력신호이다.
도7)
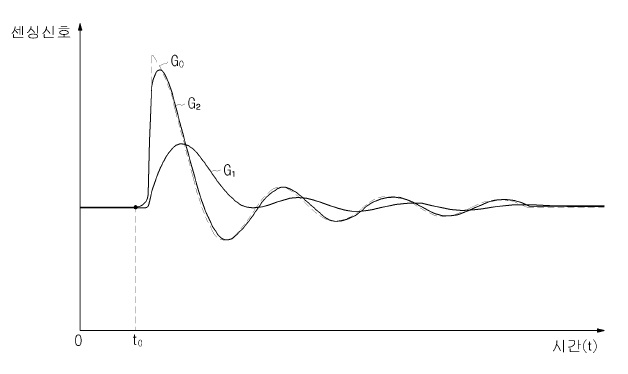
즉, 도 7의 두 출력신호(G1,G2)는 수학식 1을 포함한 필터를 통해 출력된 출력신호이다.
이때, 수학식 1에 포함된 위상지연 가중치(w)는 서로 다른 두 값인 0.9와 0.3이 선택되어 설정되며, 이를 통해0.9의 위상지연 가중치(w)를 가진 필터를 통해 출력된 출력신호가 제1출력신호(G1)이고, 0.3의 위상지연 가중치(w)를 가진 필터를 통해 출력된 출력신호가 제2출력신호(G2)이다.
도 8은 도 7의 제1출력신호를 오프셋한 그래프이다.
도8)
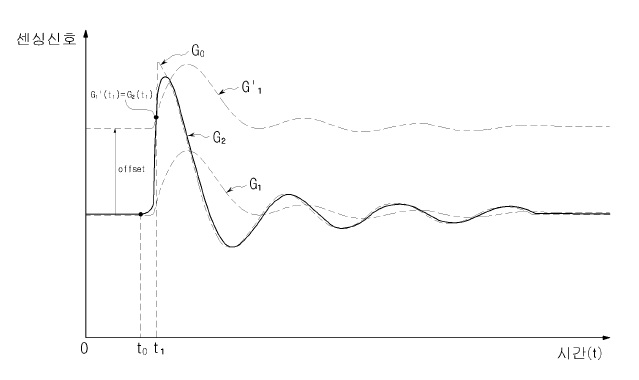
도 8을 참조하면, 제1출력신호(G1)를 사전에 설정된 오프셋(offset)값 만큼 오프셋하고, 제2출력신호(G2)가 오프셋된 제1출력신호(G1')를 초과하는지를 분석한다.
이때, 제2출력신호(G2)는 오프셋된 제1출력신호(G1')와 t1에서 일치하여 G2(t1)=G1'(t1)이 된다. t1이후에는 제2출력신호(G2)가 오프셋된 제1출력신호(G1')를 초과하는 것을 확인할 수 있다.
이에 따라, 감지된 외력을 부정적 입력으로 결정하고, 제1실시예에서와 같이, 감성대응엔진을 통해 로봇이 인가된 외력에 대해 기설정된 행동패턴에 따라 행동하도록 제어한다.
이 같은 방법을 통해, 로봇에 인가되는 외력 중 부정적 입력에 해당하는 사용자의 행위에 대해 로봇이 일정한행동을 하도록 제어됨으로써 사용자가 로봇과 더욱 상호교감하는 느낌을 가질 수 있다.
지금부터는, 상술한 제2실시예의 구체적인 일례와 비교할 수 있는 비교예에 대해 설명한다.
도 9는 제2실시예와 동일조건 하의 다른 외력이 인가된 상태를 나타낸 것이다.
도9)
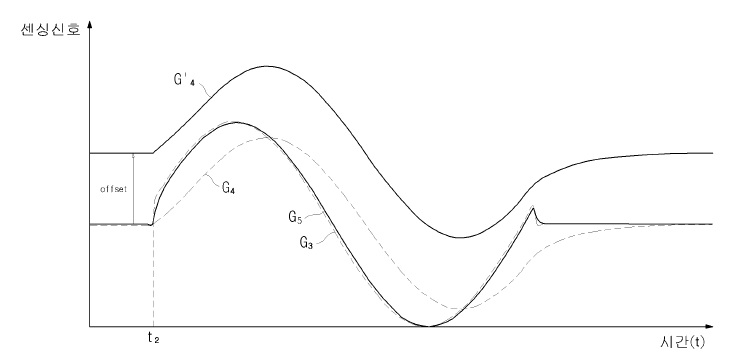
이때, 비교예는 제2실시예와 동일한 조건하에서 비교를 위해 로봇에 상기 수학식 1과 같은 필터링 수식을 포함한 필터를 마련하고, 위상지연가중치(w)와 오프셋값 또한 동일하게 적용하였다.
도 9를 참조하면, 센싱신호(G3)는 t2지점에서 외력이 인가된 것을 나타내고 있다. 즉, 로봇에 인가된 외력을 시계열적인 센싱신호(G3)로 나타내고, 센싱신호(G3)를 필터를 통해 위상지연 가중치 0.9를 적용하여 제3출력신호(G4)를 출력하고, 위상지연 가중치 0.3을 적용하여 제4출력신호(G5)로 출력한다.
이어, 제3출력신호(G4)를 설정된 오프셋값만큼 오프셋하면 오프셋된 제3출력데이터(G4')로 나타난다. 이때, 제4출력신호(G5)는 오프셋된 제3출력신호(G4')를 어느 시점에서도 초과하지 못하게 된다.
즉, 제4출력신호(G5)가 오프셋된 제3출력신호(G4')보다 항상 아래에 위치함으로써 인가된 외력은 부정적 입력이 아니라고 판단할 수 있다.
상술한 비교예에서는 인가된 외력에 대해서 설명하고 있으나, 실제 로봇에 있어서는 통상적으로 로봇의 일반적 인 제어상태에서 로봇의 움직임으로부터 유래된 시계열적인 센싱신호가 획득되며, 이때의 획득된 센싱신호에는 로봇의 내외부적인 환경 등으로부터 유래된 노이즈에 의해 외력과 같은 센싱신호를 나타낼 수도 있다.
즉, 로봇은 부정적 입력에 해당하지 않는 외력으로부터 획득된 센싱신호 또는 제어상태에서의 로봇의 움직임으로부터 획득된 센싱신호 또는 내외부적 환경요인으로부터 획득된 노이즈 등은 설정된 오프셋값에 따라 오프셋된 제3출력신호(G4')를 제4출력신호(G5)가 초과하지 않음으로써 부정적 입력으로 판단하지 않을 수 있다.
위 비교예에서 알 수 있듯이, 인가되는 외력에 대해 로봇이 얼마나 민감하게 반응을 할 것인지를 나타내는 로봇의 민감도는 사전에 설정되는 위상지연 가중치(w)와 오프셋값을 적절하게 설정함으로써 조절될 수 있다.
따라서, 인가된 외력을 분석함으로써 인가된 외력이 부정적 입력인지 아닌지를 판단할 수 있으며 부정적 입력으로 판단되었을 경우에는 이에 따라 행동하도록 제어될 수 있어 사용자가 로봇과 더욱 밀접한 상호교감을 나눌 수 있게 된다.
본 발명의 권리범위는 상술한 실시예에 한정되는 것이 아니라 첨부된 특허청구범위 내에서 다양한 형태의 실시예로 구현될 수 있다. 특허청구범위에서 청구하는 본 발명의 요지를 벗어남이 없이 당해 발명이 속하는 기술분야에서 통상의 지식을 가진 자라면 누구든지 변형 가능한 다양한 범위까지 본 발명의 청구범위 기재의 범위내에 있는 것으로 본다.
출원인: (주)다사로봇
발명자: 이종문 최대성 박종승
대리인 :조영현, 나승택
'로봇의 감성표현방법' 특허 자세히 보기
 동향
동향
 차량 / 처리조작
차량 / 처리조작
